As a long-standing user of Sonardyne underwater tracking technology, MSDS Marine recently got the opportunity to trial their newly released Micro-Ranger 2 portable Ultra-Short Baseline (USBL) system. In this blog Mark James discusses the system and the trials we have been conducting.
Acoustic tracking works by using sound to measure the range and the bearing of a beacon from a transducer fixed to either a boat or fixed structure such as a pontoon. Combining this information with a GPS position allows for real world positions of divers, ROVs or subsurface assets, to be determined.
USBL tracking has been used in marine archaeology for a number of decades, but has often required specialist knowledge, expensive equipment, and suitable vessel mounts for all the components. The introduction of Sonardyne’s Micro-Ranger 2 system in 2018 provided an entry-level USBL system that could be deployed from almost any platform and track up to ten beacons (on divers or ROVs) with an out the box slant range accuracy of 5% (2.5m at 50m range). The system is supplied with all the components, including the topside unit, transducer, transponders, and a GPS antenna and can be up and running within 30 minutes for a first-time user.
The release of the portable system earlier this year took the concept one step further, by packaging the entire system, including transceiver, 10 metres of deck cable, GPS antenna, and a Wi-Fi enabled PC interface unit and 10 hour power supply into a IP-67 rated waterproof Peli case, Sonardyne has even found room to include two beacons.
Whilst the accuracy of the system can be improved through the use of external sensors, such as a GPS or Gyro compass and a Motion Reference Unit (MRU), the addition of external sensors takes the system away from being an out-of-the-box, simple to deploy, solution, to one requiring more time and expertise to mobilise. Therefore, for the first few trials we made the decision to deploy the system as intended to gauge the capabilities and ease of use in a real-world environment. Whilst we are experienced in the deployment and operation of acoustic tracking systems, for the trial of this system we really tried to go back to basics, to not only use the system as intended, but to also gauge how easy it might be to be deployed by different user groups with a range of experience and how this might translate to useful outputs within general diving surveys, be that archaeological, biological or even search and rescue.


The first trial site was the designated wreck of the Northumberland, a 70-gun ship of the line built in 1679, that was wrecked on the Goodwin Sands during the great storm of 1703. MSDS Marine were commissioned by Pascoe Archaeology Services (PAS) to provide the diving support for a Historic England (HE) funded archaeological survey on the wreck. The survey aimed to assess the current condition of the site, following a recent Multibeam Echosounder (MBES) survey, which suggested that movement of sand waves on the seabed might be putting the site at risk. Acoustic tracking was an excellent tool to use during the project to enable the divers to be directed to features identified in the MBES and to record the location of features identified during the dives. With a high resolution MBES to use as the basemap for the divers, the use of a day boat, which needs the system mobilising quickly on reaching the site each day and the usual requirement to be getting divers in the water at slack water, meant the site was a very good real-world trial location.
To really get a feel for the system and how easy it is to use, the case was opened to check everything was there and then it was set aside to be taken to site, with the plan to set it up the night before without the luxury of an office! The only consideration prior to mobilisation was how to mount the system to the dive boat. In keeping with the easy deployment philosophy, we fabricated a 4m aluminium pole with a flange at the bottom to mount the transceiver and a socket at the top to mount the supplied GPS antenna. The pole was designed to be long enough to place the transceiver below the hull of the boat and the GPS above the wheelhouse roof so that there would be limited blocking of acoustic or GPS signals. The advantage of a simple solution like this is that everything is in one plane, meaning there is less room for error when measuring offsets or if the pole moves slightly when in use. It can also be mounted to any vessel quickly and easily with the use of ratchet straps.



Not quite brave enough to set it up for the very first time on the boat, we did this on arrival at the accommodation the night before the first day’s diving. Having installed the Ranger 2 software on our laptop we pulled out the bag of ethernet cables and a network switch only to realise very quickly the system has its own Wi-Fi connection and that all that is required is to connect to that. The Mini Ranger Transceiver (MRT) was put in a big bucket of water, the GPS mounted outside and then everything was connected and powered up. A moment later and the transducer and GPS are connected and the system was operational. At this point offsets of the MRT and the GPS can be entered, but as these need to be in relation to a reference point on the vessel this was left until the next day.
So far so good. The next job was to add tracking beacons. Each beacon, Sonardyne calls them Nanos, was placed in their wireless NFC charger docking station, which also doubles as an interface between the beacon and a computer, but also allows it to be enabled and disabled. Both Nanos were enabled and put in the bucket of water with the transceiver. A quick run through the add beacon wizard and both were configured and ready to go. Both beacons were able to output a position, both visually relative to the boat and a real-world position, such as a GPS would. From this point onward, subject to a few measurements and offsets to input, the system was ready to go.

For general tracking relative to a fixed point, or to a vessel, this is all that needs to be done to start tracking divers or an ROV. For our needs, however, we needed to be able to track divers in relation to the MBES data, and so came the most technical part of our setup. Usually, we would configure the Ranger 2 software to output the position of the beacons and/or the vessel to a Com Port, connecting another laptop which would read the position and display it within a geographical information system (GIS – a program which lets you view maps, manage position data and georeferenced images, and then interrogate this data).
To keep the system as simple as possible and reduce the amount of equipment required on the boat, we wanted to keep everything running on one laptop. A position can be exported from the Ranger 2 software using the Telegram tab. Here the positions of the beacons and the vessel can be outputted in a standard format and in order of priority. The Com Port that the data goes to can also be selected here. But, rather than a physical link between two laptops, we set up a virtual Com Port pair, one to send the data and one to receive the data all on the same laptop. This can be achieved using free to download software and, once set up, can be selected easily within the Ranger 2 software.
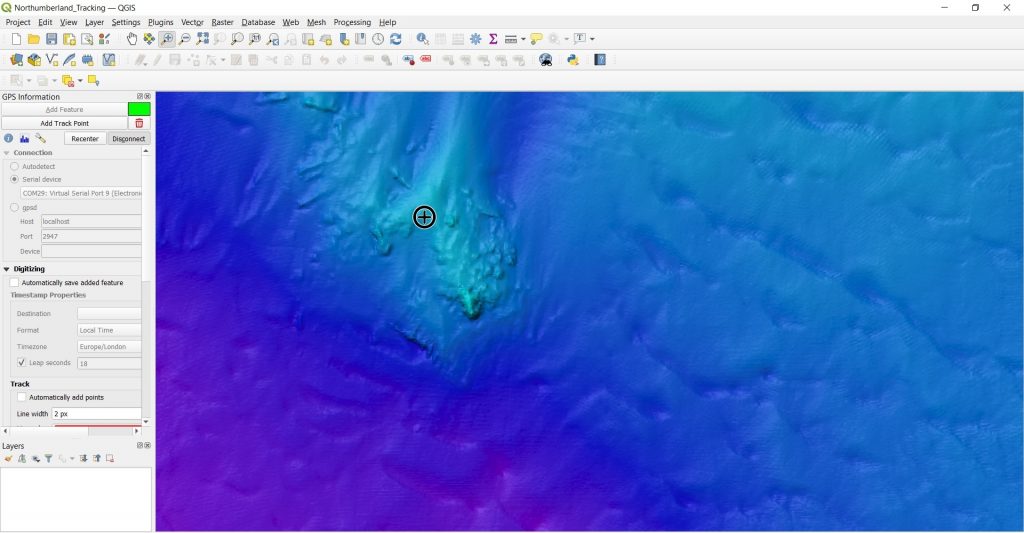
Within archaeology there are a number of programs that are typically used for GIS applications. With tracking, MSDS Marine generally use Site Recorder from 3H Consulting, as it contains features designed to assist in archaeological survey. For this trial, though, we chose to use a free to download program called Quantum GIS (QGIS), as it is used by a lot of organisations both within and outside of archaeology. QGIS was downloaded and installed on the laptop and a new project created with the correct co-ordinate system. The MBES georeferenced image was imported and, with a few clicks, including selecting the correct Com Port, the program was receiving the position feed from the Ranger 2 software. Being onshore it was not possible to check the positional accuracy against the MBES data, but we were able to check the position corresponded to the garden of the accommodation using a satellite image.
All that remained to do was to put the topside unit, beacons and laptop on charge ready for deployment on the boat the next morning. In total the setup time was around 90 minutes, 20 to 30 minutes to setup the tracking and around an hour to download, install, setup and test the GIS.

The boat used for the project was Predator, a 10m-long catamaran fairly typical of the type of boat chartered for diving projects. The boat has no special mounts for survey equipment, so it was a real test of a real world install. An early start the next morning meant we had to use the transit time to site to attach the MRT and GPS to the pole and figure out how to mount it securely. On site, in amongst getting divers ready, the pole was securely fixed to the boat using ratchet straps. Following installation, the system was powered up and offsets measured and input into the Ranger 2 software. This was a very simple process and involved clicking through the transducer and GPS (GNSS) settings and filling in the information as required. The only offset that required a little thought was the Magnetic Offset between true north and magnetic north, but this can be found with a quick internet search.


It is worth mentioning at this point that there are a number of inbuilt sensors within the MRT that help aid accuracy. These include a compass, so that the transceiver knows which way it is pointing, and an MRU (motion reference unit), so the unit also knows its orientation. The software takes the values from these sensors, along with the offsets between the transducer and the GPS, to calculate an accurate position. It is for this reason that having the transceiver and the GPS on the same pole will ensure better positional accuracy. It is also why the pole does not have to remain perfectly still or vertical during operation.
After installation, but prior to use, the internal magnetic compass needs to be calibrated to ensure that any local variations caused by ferrous material on the boat do not interfere with it. Calibration is achieved through setting the calibration running in the software and then turning the boat in a circle for three minutes. The calibration will then be automatically saved and applied. A transceiver alignment calibration was undertaken whereby a beacon was placed on the seabed, the position marked, and the boat driven away from the position for around 114 metres. Any error in alignment appeared as an offset between the marked position of the beacon and the tracked position of the beacon. The size of the offset was used to calculate a calibration value, which was then input in the software. The calibration options are more limited than can be found on some of the higher end tracking systems, but they are suitable for the intended use as long as the offset values are accurate and input correctly.
The system took approximately 30 minutes to install and calibrate and was ready for the divers to be deployed with beacons. The beacons do not come with a method of attachment, so we fashioned some using hose clips and piston clips that we use for attaching other diving equipment. Each diver in the pair was given a beacon which was attached to them. For optimal tracking capability the Nanos should be mounted where there would be line of site between the beacon and the transceiver above and out of the way of bubbles. Typically, this could be on top of the cylinder valve or floating above the diver. For this deployment we clipped the beacons to the front of the diver so that they could be removed and placed on top of features that we wanted to record the position of.
Within a few seconds of the divers entering the water, the Ranger 2 software started tracking the beacons and displayed the positions on the screen. The position of the diver was then visible in real time within the GIS program. Although only one of the positions (either diver 1, diver 2 or the boat) can be viewed at a time in the GIS, they can be selected by toggling each beacon on or off in the Ranger 2 software. Once tracking the diver, the topside supervisor was able to guide them to, and around, the site using voice communications, recording where they had been and features of interest and descriptions within the GIS. Where particular features required a more accurate position to be taken the beacon was placed on top of the feature for 30 seconds so that an average position could be taken. Following the dive, the data from the GIS was downloaded and further dives planned based on the results.

The system was mobilised and used as it came, out of the box, with no additional external sensors. The most accurate positioning will be achieved when the transceiver is not mobile, such as on a pontoon or an anchored boat. Due to the nature of the project, the boat was constantly mobile and changing speed, distance, and orientation, all of which can influence the absolute positional accuracy. Whilst the relative accuracy of the beacon position in relation to the transceiver will not be affected by the GPS accuracy, the real-world position will be and this needs to be taken into consideration as this can introduce errors of up to a few meters. Overall, though, the position of the beacons corresponded with features identified on the seabed by up to two metres, with this reducing significantly when the vessel was closer to the beacons.
The Micro-Ranger 2 portable system was a very simple and easy solution to track divers with minimal setup and technical knowledge. Considering the environment and how it was used, the level of accuracy was impressive and suitable for most general diver tracking work. Over the next few months we will be experimenting with external sensors, such as uprated GPS and heading sensors, as well as offering our thoughts on areas where we believe that further improvements could be made to the system.
Thanks to Pascoe Archaeology Services for letting us bring the system and trial in on the Northumberland project and Sonardyne for trusting us with it!